This clip shows a robot following the edge of a circular table.
The infrared sensors on the arms dectect the table and the code then
tells the motors to turn the robot. This one was built by Anant
Kumar Singh and Arpita Nigam under my direction.
Short video clip of an edge-following robot
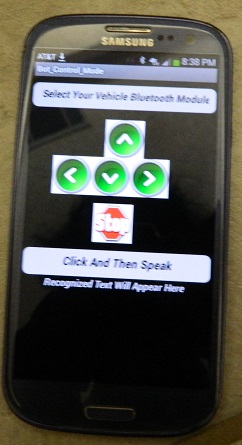
In this clip, I'm controlling the robot using my cell phone.
The phone pairs with the BlueTooth module on the robot and I can have
robot move forward, backward, and turn left and right. Below are
some stills of the controller on my (Android) phone and of the robot
itself. (Clip added March 19, 2015) The robot code was
written by Arpita Nigam and Anant Kumar Singh and the Android app was
written by Anant using MIT App Inventor.
Remote-controlled Robot
This is the program that controls the robot.
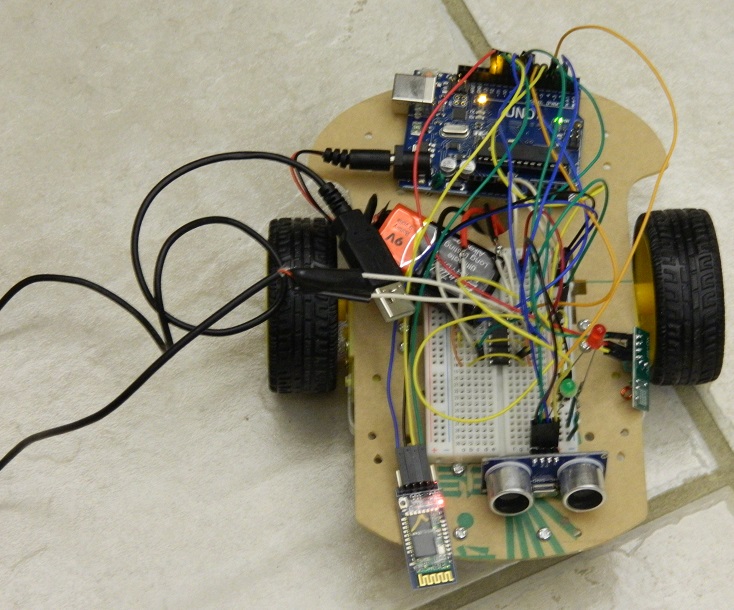
In the photo above, the BlueTooth module is at the bottom left and
the rangefinder is the device with two metal "cans" projecting from it.
The USB connector in the left center goes to a rechargeable 5V battery
which powers the motors and most of the devices on the board. The
9V battery powers the Arduino. The chip in the center of the
prototype board is the motor controller.
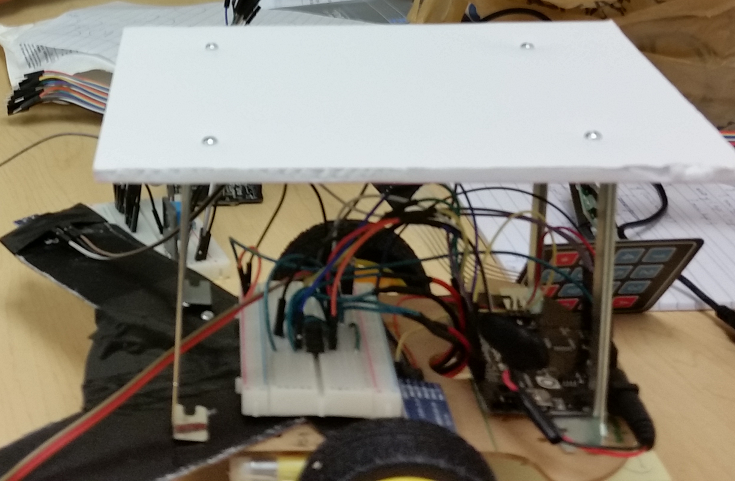
The edge-follower robot with a second tier. The stand-offs are
placeholders from old computer cases. The platform is foam-core
board. We can use this for the batteries. Programming by
Arpita Nigam and Anant Kumar Singh.